1: ĮėŠĆ╩ŠęŌłDŻ©═¼TB6612FNG░µ▒ŠŻ®
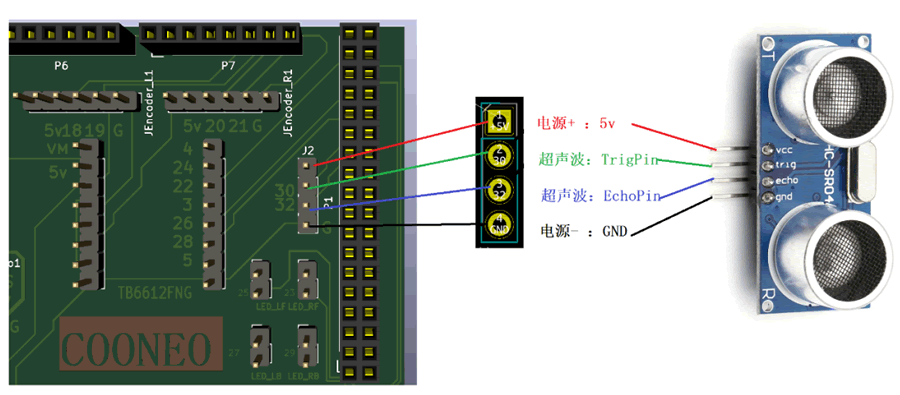
2: ▀BŠĆ═Ļ«ģ║¾Ż¼┤“ķ_╬ęéāĄ─│╠ą“Ż¼šęĄĮ sensors.h ╬─╝■Ż¼╚ńŽ┬╦∙╩ŠŻ║
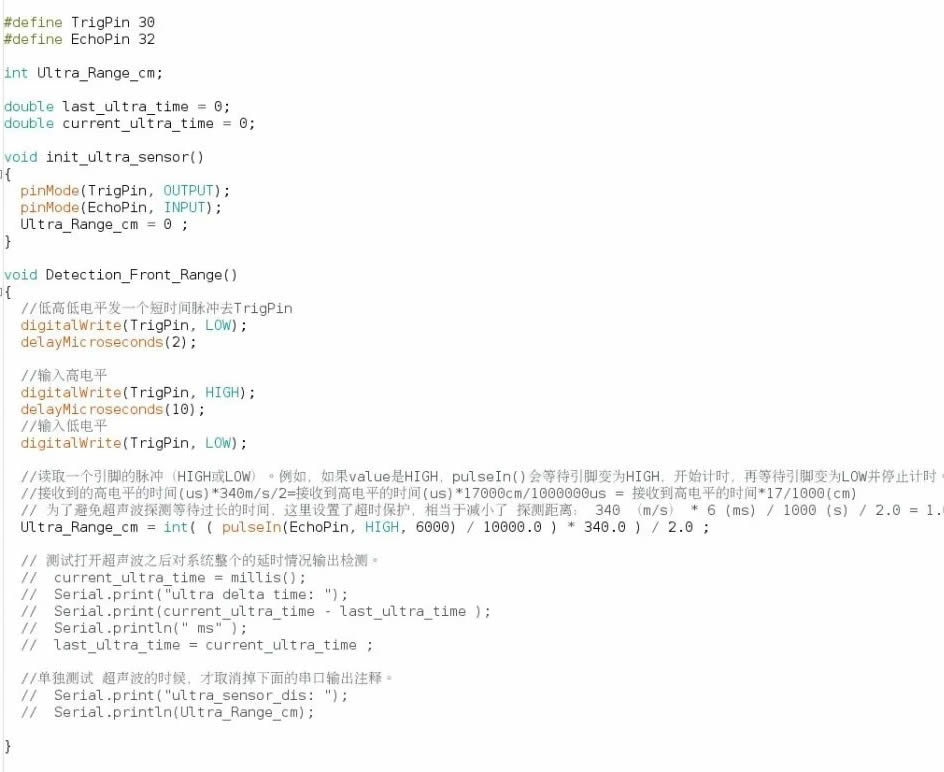
įō│╠ą“Č©┴x┴╦ę╗éĆ┤µā”£yŠÓą┼ŽóĄ─ūā┴┐ Ultra_Range_cm , £yŠÓĘČć·×ķĪ░0-1mĪ▒ĪŻ┤╦ĢrŻ¼╬ęéā┐╔ęį┐┤ęŖūŅŽ┬├µėąā╔┤¾Č╬ūóßīĪŻŲõųąŻ¼Ą┌ę╗Č╬╩Ūė├üĒ£yįćš¹éĆŽĄĮy(t©»ng)╣”─▄ł╠(zh©¬)ąąę╗▒ķ╦∙ąĶꬥ─ĢrķgŻ¼╚¶╚ĪŽ¹Ą¶ūóßīŻ¼╝┤┐╔į┌ ┤«┐┌▒O(ji©Īn)ęĢŲ„ īŹ(sh©¬)Ģr▓ķ┐┤▌ö│÷Ą─Ģrķgą┼ŽóĪŻ
3Ż║×ķ┴╦£yįć│¼┬Ģ▓©£yŠÓ╩Ūʱ£╩(zh©│n)┤_Ż¼▀@└’ąĶę¬╚ĪŽ¹Ą¶Ą┌Č■┤¾Č╬Ą─ūóßīŻ¼╚╗║¾į┘┤╬īó│╠ą“¤²õøĄĮArduinoķ_░l(f©Ī)░ÕųąŻ║
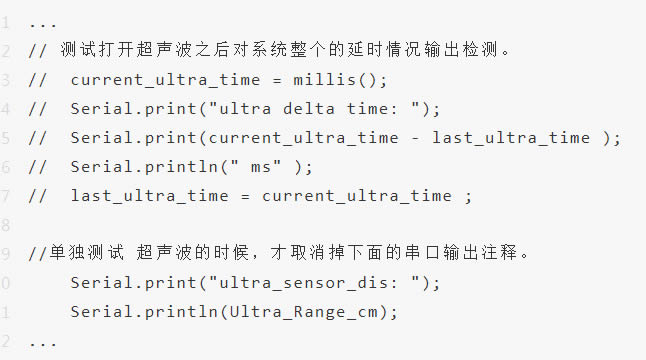
╚╗║¾╝╚┐╔ęįį┌ ┤«┐┌▒O(ji©Īn)ęĢŲ„ ųą▓ķ┐┤īŹ(sh©¬)ĢrĄ─£yŠÓ▌ö│÷ą┼Žó└▓Ż¼─Ń┐╔ęįė├│▀ūė“×(y©żn)ūCę╗Ž┬Ż¼▌ö│÷Ą─£yŠÓą┼Žó╩Ūʱ£╩(zh©│n)┤_─žŻ¼“×(y©żn)ūC═Ļ«ģų«║¾Ż¼ėøĄ├╗ųÅ═(f©┤) ╔Ž╩÷Ą─ā╔ąąūóßīĪŻ
░▓čb6┬ĘLED─ŻĮM;LED¤¶Ą─░▓čb╬╗ų├║═║¼┴x;LED¤¶ķWĀqĘĮ╩ĮĄ─įO(sh©©)ėŗ(j©¼),ūįČ©┴x┴╦ÄūĘNLEDķWĀqĄ─ĘĮ╩Į;³c(di©Żn)¤¶─ŻĮMĄ──Ż╩Į▀xō±LEDķWĀqĀŅæB(t©żi)Ą─ŪąōQĘĮ╩Į
Ąū▒PÖC(j©®)Ų„╚╦ąĪ▄ć3DöĄ(sh©┤)─ŻįO(sh©©)ėŗ(j©¼)łD╝łSolidworks,ÖC(j©®)Ų„╚╦Ąū▒PįO(sh©©)ėŗ(j©¼)łD╝łµ£ĮėŻ║https://pan.baidu.com/s/1EiO1ufVPU04hU1MpzNNlcw ╠ß╚Ī┤aŻ║ynai
▓╔ė├╝ż╣ŌSLAMūį╚╗ī¦(d©Żo)║Į,ÖC(j©®)Ų„╚╦Ė³╝ėūįų„ņ`╗Ņ;ĄžłD├µĘe▓╗╩▄Ž▐ųŲ,ØMūŃ┤¾┐šķgł÷Š░╩╣ė├;─▄┼cļŖ╠▌,ļŖäėķTīŹ(sh©¬)Ģr═©ėŹ,ØMūŃ┐ńśŪīė,┐ń▓ĪĘ┐╩╣ė├
äō(chu©żng)Ø╔ÖC(j©®)Ų„╚╦ŲĮ┼_╠ß╣®═Ļ╔ŲĄ─SDK,╚╬ęŌ▀M(j©¼n)ąąČ■┤╬ķ_░l(f©Ī),Ė∙ō■(j©┤)ā╚(n©©i)╚▌▀M(j©¼n)ąąĮ╗╗ź,Į╗╗źā╚(n©©i)╚▌┐╔ęįĖ∙ō■(j©┤)┼õų├įO(sh©©)Č©×ķš{(di©żo)┘®╗“śI(y©©)äš(w©┤)ū╔įā,╠ß╣®ÖC(j©®)Ų„╚╦▒ĒŪķ║═ÖC(j©®)Ų„╚╦ī”įÆĮń├µ
äō(chu©żng)Ø╔ÖC(j©®)Ų„╚╦Ąū▒PÖC(j©®)╔Ē│▀┤ńąĪŪ╔Šo£É,50ČÓCMūŅąĪšŁĄ└═©ąą─▄┴”,▓╗╣▄į┌ŠŲĄĻū▀└╚┼c╚╦▓┴╝ńČ°▀^,▀Ć╩Ūį┌▓═Åd▓═ū└ķgĄ─ū▀Ą└┤®╦¾▀Ć╩Ūį┌│¼╩ą,▒Ń└¹ĄĻĄ╚ł÷Š░ąąū▀Č╝╩«ĘųĒśĢ│
äō(chu©żng)Ø╔ī¦(d©Żo)║ĮĘ■äš(w©┤)ÖC(j©®)Ų„╚╦Ąū▒Pķ_Ę┼Ą─▄øė▓╝■Įė┐┌,×ķčą░l(f©Ī)╚╦åT╣Ø(ji©”)╩Ī┤¾┴┐Ą─ĢrķgŠ½┴”║═│╔▒Š,┐╔æ¬(y©®ng)ė├ė┌Ž¹ČŠÖC(j©®)Ų„╚╦,┼õ╦═ÖC(j©®)Ų„╚╦║═ėŁ┘eĘ■äš(w©┤)ÖC(j©®)Ų„╚╦Ą╚ČÓĘN«a(ch©Żn)ŲĘł÷Š░
äō(chu©żng)Ø╔Ž¹ČŠÖC(j©®)Ų„╚╦Ąū▒Pķ_Ę┼Ą─▄øė▓╝■Įė┐┌,┐╔┤Ņ▌dŽ¹ČŠįO(sh©©)éõį┌╔╠ł÷,▓═Åd,▐k╣½śŪ,ŃyąąĄ╚ł÷Š░Ž┬ūįų„ęŲäė▓óųŪ─▄ęÄ(gu©®)äØ┬ĘŠĆ,▀M(j©¼n)ąąŽ¹ČŠū„śI(y©©),╚½ĘĮ╬╗┴ó¾w¤o╦└ĮŪŽ¹ČŠ
ęŲäėÖC(j©®)Ų„╚╦Ąū▒P└m(x©┤)║Į10éĆąĪĢręį╔Ž,ę╗┤╬Į©łD│¼▀^Äū╚fŲĮĘĮ,╚┌║ŽČÓéĆęĢėXé„ĖąŲ„ī”ąąū▀Łh(hu©ón)Š│▀M(j©¼n)ąą┴ó¾wĮ©─Ż,ØMūŃČÓĘNł÷Š░Ž┬╩╣ė├ėą5┤¾ā×(y©Łu)ä▌
ęŲäėÖC(j©®)Ų„╚╦Ąū▒P╚┌║Ž┴╦╝ż╣Ō└ū▀_(d©ó),│¼┬Ģ▓©é„ĖąŲ„,┼õ║ŽŽ╚▀M(j©¼n)Ą─ī¦(d©Żo)║Į╦ŃĘ©;│ą▌d┴╦ÖC(j©®)Ų„╚╦▒Š╔ĒĄ─ęŲäė,Č©╬╗,ī¦(d©Żo)║Į┼c▒▄šŽĄ─╗∙▒Š╣”─▄,─▄ē“ūīÖC(j©®)Ų„╚╦īŹ(sh©¬)¼F(xi©żn)ųŪ─▄ęŲäė
äō(chu©żng)Ø╔ųŪ─▄ęŲäė╩ĮĖąų¬Ąū▒Pų„ę¬ė╔╝ż╣Ō└ū▀_(d©ó),╔ŅČ╚özŽ±Ņ^,│¼┬Ģ▓©╝░Ę└Ą°┬õé„ĖąŲ„Ą╚║╦ą─ė▓╝■ĮM│╔,ū„×ķÖC(j©®)Ų„╚╦Ą─ļp─_,╩ŪīŹ(sh©¬)¼F(xi©żn)ÖC(j©®)Ų„╚╦ūįų„ęŲäė▒▄šŽĄ╚ČÓĘN╣”─▄Ą─ųžę¬║╦ą─▓┐╝■
ÖC(j©®)Ų„╚╦ęŲäė║═│ą▌dĄ─ų¦ō╬į┌Ąū▒P,äō(chu©żng)Ø╔┴∙▌åÖC(j©®)Ų„╚╦Ąū▒Pū„×ķÖC(j©®)Ų„╚╦Ą─ļpūŃ,Š▀ėąņ`╗ŅąįÅŖ(qi©óng),▀\(y©┤n)äėįļ궥═Ą╚╠ž³c(di©Żn),┐╔ęį─ŻöM╚╦ŅÉūįė╔ąąū▀Ą──▄┴”
äō(chu©żng)Ø╔═©ė├ÖC(j©®)Ų„╚╦Ąū▒P═žš╣ąįĘŪ│ŻÅŖ(qi©óng),┐╔┤Ņ▌d▓╗═¼ÖC(j©®)ąĄįO(sh©©)éõīŹ(sh©¬)¼F(xi©żn)ČÓŅI(l©½ng)ė“æ¬(y©®ng)ė├,╚ńŽ¹ČŠÖC(j©®)Ų„╚╦,ėŁ┘eÖC(j©®)Ų„╚╦,ųvĮŌÖC(j©®)Ų„╚╦,┼õ╦═ÖC(j©®)Ų„╚╦║═č▓ÖzÖC(j©®)Ų„╚╦Ą╚,┐╔ÅVĘ║▀mė├ė┌▓═Åd╔╠ł÷Ńyąą▐k╣½śŪĄ╚ł÷Š░